
一、AT24CXXX容量
AT24C01,AT24C02,AT24C04,AT24C08,AT24C16,AT24C32,AT24C64,AT24C128,AT24C256…不同的xxx代表不同的容量。
| AT24CXXX | bit容量 | Byte容量 |
|---|---|---|
| AT24C01 | 1Kbit | 128Byte |
| AT24C02 | 2Kbit | 256Byte |
| AT24C04 | 4Kbit | 512Byte |
| AT24C08 | 8Kbit | 1024Byte |
| AT24C16 | 16Kbit | 2048Byte |
| AT24C32 | 32Kbit | 4096Byte |
| AT24C64 | 64Kbit | 8192Byte |
| AT24C128 | 128Kbit | 16384Byte |
| AT24C256 | 256Kbit | 32768Byte |
| AT24C512 | 512Kbit | 65536Byte |
二、AT24CXXX页与页内单元
总容量(Byte容量) = 页数 × 页内字节单元数。
| AT24CXXX | Byte容量 | 页数 | 页内字节单元数 |
|---|---|---|---|
| AT24C01 | 128Byte | 16页 | 8Byte |
| AT24C02 | 256Byte | 32页 | 8Byte |
| AT24C04 | 512Byte | 32页 | 16Byte |
| AT24C08 | 1024Byte | 64页 | 16Byte |
| AT24C16 | 2048Byte | 128页 | 16Byte |
| AT24C32 | 4096Byte | 128页 | 32Byte |
| AT24C64 | 8192Byte | 256页 | 32Byte |
| AT24C128 | 16384Byte | 256页 | 64Byte |
| AT24C256 | 32768Byte | 512页 | 64Byte |
| AT24C512 | 65536Byte | 512页 | 128Byte |
三、AT24CXXXX寻址方式(不是IIC地址,是存储器内部寻址)
对AT24CXXX进行读写操作时,都得先访问存储地址、比如AT24C01写一个字节的IIC时序:
先发送设备地址,收到应答后再发送需要写数据的地址(WORD ADDRESS)。AT24C01容量为128Byte则WORD ADDRESS只需要7bit就可以覆盖128Byte的数据地址。通俗的讲就是128Byte就占用了128个地址,一个7bit的数据范围为(0-127)刚好128,所以128Byte的字节地址需要一个7bit的数据来表示。
AT24CXXX 字节地址如下(*表示无效位):
| AT24CXXX | 容量(Byte) | WORD ADDRESS(占用bit数) | WORD ADDRESS |
|---|---|---|---|
| AT24C01 | 128Byte | 7bit |  |
| AT24C02 | 256Byte | 8bit |  |
| AT24C04 | 512Byte | 9bit | 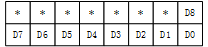 |
| AT24C08 | 1024Byte | 10bit | 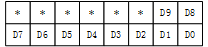 |
| AT24C16 | 2048Byte | 11bit | 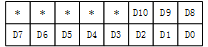 |
| AT24C32 | 4096Byte | 12bit | 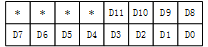 |
| AT24C64 | 8192Byte | 13bit | 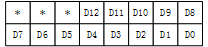 |
| AT24C128 | 16384Byte | 14bit | 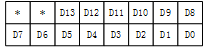 |
| AT24C256 | 32768Byte | 15bit | 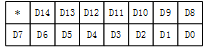 |
| AT24C512 | 65536Byte | 16bit | 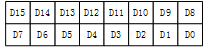 |
四、AT24CXXX页地址与页内单元地址
比如AT24C256有512页每页64个字节,15bit的地址数据对其寻址,低6bit(D5-D0)为页内字节单元地址,高9bit(D14-D6)为页地址。
如第16页开始写,则WORD ADDRESS = 0x0400(0000 0100 0000 0000)
0:地址无效位
000 0100 00:9位页地址
00 0000:6位页内字节单元地址
下表如AT24C01
16页:需要4bit寻址(2^4=16)
8Byte:需要3bit寻址(2^3=8)
| AT24CXXX | Byte容量 | 页数 | 页内字节单元数 | 页地址 页内偏移地址 |
|---|---|---|---|---|
| AT24C01 | 128Byte | 16页 | 8Byte |  |
| AT24C02 | 256Byte | 32页 | 8Byte |  |
| AT24C04 | 512Byte | 32页 | 16Byte |  |
| AT24C08 | 1024Byte | 64页 | 16Byte |  |
| AT24C16 | 2048Byte | 128页 | 16Byte |  |
| AT24C32 | 4096Byte | 128页 | 32Byte |  |
| AT24C64 | 8192Byte | 256页 | 32Byte |  |
| AT24C128 | 16384Byte | 256页 | 64Byte |  |
| AT24C256 | 32768Byte | 512页 | 64Byte |  |
| AT24C512 | 65536Byte | 512页 | 128Byte |  |
查看手册
AT24C01字节寻址需一个7bit地址:
AT24C128字节寻址需一个14bit地址:
以此类推,其实就是上面总结的那张表。
五、AT24CXXX IIC地址
IIC通信需要先向从设备发送设备地址,AT24CXXX芯片上有A2、A1、A0引脚,通过这三个引脚我们就可以自定义AT24CXXX芯片的通信地址。
地址构成如下(手册上都会有写),比如A2、A1、A0接地,则IIC写地址为1010 0000(0xA0),读地址为1010 0001(0xA1),有关IIC地址详情请看IIC协议详解
六、AT24CXXX 数据的读写
AT24C256为例
1、字节写

2、按页写

★★★注意:
往AT24CXXX中写数据时,每写一个Byte的数据页内地址+1,当前页写满后会重新覆盖掉这一页前面的数据,而不会自动跳转到下一页,但是读会自动翻页。
具体看手册:
3、如何翻页写
按页写其实就是执行一次下面的时序,也就是发送一次从机设备和字节地址最大就可以写入64字节的数据,如果要连写多页,就重新按照以下时序发送从机地址和字节地址等。
4、读
有以下模式,和写差不多

七、源程序
1、i2c_gpio.h
#ifndef _BSP_I2C_GPIO_H
#define _BSP_I2C_GPIO_H#include "stm32f4xx.h"#define I2C_WR 0 // 写控制bit
#define I2C_RD 1 // 读控制bitvoid BSP_AT24CXX_InitI2C(void);
void i2c_Start(void);
void i2c_Stop(void);
void i2c_SendByte(uint8_t _ucByte);
uint8_t i2c_ReadByte(void);
uint8_t i2c_WaitAck(void);
void i2c_Ack(void);
void i2c_NAck(void);
uint8_t i2c_CheckDevice(uint8_t _Address);#endif
2、i2c_ee.h
#ifndef __I2C_EE_H
#define __I2C_EE_H#include "stm32f4xx.h"/* * AT24C02 2kb = 2048bit = 2048/8 B = 256 B* 32 pages of 8 bytes each** Device Address* 1 0 1 0 A2 A1 A0 R/W* 1 0 1 0 0 0 0 0 = 0xA0* 1 0 1 0 0 0 0 1 = 0xA1 *//* AT24C01/02每页有8个字节 * AT24C04/08A/16A每页有16个字节 、*/#define AT24C512#ifdef AT24C01#define EE_MODEL_NAME "AT24C01"#define EE_DEV_ADDR 0xA0 /* 设备地址 */#define EE_PAGE_SIZE 8 /* 页面大小(字节) */#define EE_SIZE 128 /* 总容量(字节) */#define EE_ADDR_BYTES 1 /* 地址字节个数 */#define EE_ADDR_A8 0 /* 地址字节的高8bit不在首字节 */
#endif#ifdef AT24C02#define EE_MODEL_NAME "AT24C02"#define EE_DEV_ADDR 0xA0 /* 设备地址 */#define EE_PAGE_SIZE 8 /* 页面大小(字节) */#define EE_SIZE 256 /* 总容量(字节) */#define EE_ADDR_BYTES 1 /* 地址字节个数 */#define EE_ADDR_A8 0 /* 地址字节的高8bit不在首字节 */
#endif#ifdef AT24C04#define EE_MODEL_NAME "AT24C04"#define EE_DEV_ADDR 0xA0 /* 设备地址 */#define EE_PAGE_SIZE 8 /* 页面大小(字节) */#define EE_SIZE 512 /* 总容量(字节) */#define EE_ADDR_BYTES 1 /* 地址字节个数 */#define EE_ADDR_A8 1 /* 地址字节的高8bit在首字节 */
#endif#ifdef AT24C08#define EE_MODEL_NAME "AT24C08"#define EE_DEV_ADDR 0xA0 /* 设备地址 */#define EE_PAGE_SIZE 16 /* 页面大小(字节) */#define EE_SIZE (16*64) /* 总容量(字节) */#define EE_ADDR_BYTES 2 /* 地址字节个数 */#define EE_ADDR_A8 1 /* 地址字节的高8bit在首字节 */
#endif#ifdef AT24C16#define EE_MODEL_NAME "AT24C16"#define EE_DEV_ADDR 0xA0 /* 设备地址 */#define EE_PAGE_SIZE 16 /* 页面大小(字节) */#define EE_SIZE (128*16) /* 总容量(字节) */#define EE_ADDR_BYTES 2 /* 地址字节个数 */#define EE_ADDR_A8 1 /* 地址字节的高8bit在首字节 */
#endif#ifdef AT24C32#define EE_MODEL_NAME "AT24C32"#define EE_DEV_ADDR 0xA0 /* 设备地址 */#define EE_PAGE_SIZE 32 /* 页面大小(字节) */#define EE_SIZE (128*32) /* 总容量(字节) */#define EE_ADDR_BYTES 2 /* 地址字节个数 */#define EE_ADDR_A8 1 /* 地址字节的高8bit在首字节 */
#endif#ifdef AT24C64#define EE_MODEL_NAME "AT24C64"#define EE_DEV_ADDR 0xA0 /* 设备地址 */#define EE_PAGE_SIZE 32 /* 页面大小(字节) */#define EE_SIZE (256*32) /* 总容量(字节) */#define EE_ADDR_BYTES 2 /* 地址字节个数 */#define EE_ADDR_A8 1 /* 地址字节的高8bit在首字节 */
#endif#ifdef AT24C128#define EE_MODEL_NAME "AT24C128"#define EE_DEV_ADDR 0xA0 /* 设备地址 */#define EE_PAGE_SIZE 64 /* 页面大小(字节) */#define EE_SIZE (256*64) /* 总容量(字节) */#define EE_ADDR_BYTES 2 /* 地址字节个数 */#define EE_ADDR_A8 0 /* 地址字节的高8bit不在首字节 */
#endif#ifdef AT24C256#define EE_MODEL_NAME "AT24C256"#define EE_DEV_ADDR 0xA0 /* 设备地址 */#define EE_PAGE_SIZE 64 /* 页面大小(字节) */#define EE_SIZE (512*64) /* 总容量(字节) */#define EE_ADDR_BYTES 2 /* 地址字节个数 */#define EE_ADDR_A8 0 /* 地址字节的高8bit不在首字节 */
#endif#ifdef AT24C512#define EE_MODEL_NAME "AT24C512"#define EE_DEV_ADDR 0xA0 /* 设备地址 */#define EE_PAGE_SIZE 128 /* 页面大小(字节) */#define EE_SIZE (512*128) /* 总容量(字节) */#define EE_ADDR_BYTES 2 /* 地址字节个数 */#define EE_ADDR_A8 0 /* 地址字节的高8bit不在首字节 */
#endif#endif /* __I2C_EE_H */3、i2c_gpio.c
*
*********************************************************************************************************
*
* 模块名称 : I2C总线驱动模块
* 文件名称 : bsp_i2c_gpio.c
* 版 本 : V1.0
* 说 明 : 用gpio模拟i2c总线, 适用于STM32F4系列CPU。该模块不包括应用层命令帧,仅包括I2C总线基本操作函数。
*
* 修改记录 :
* 版本号 日期 作者 说明
* V1.0 2013-02-01 armfly 正式发布
*
* Copyright (C), 2013-2014, 安富莱电子 www.armfly.com
*
*********************************************************************************************************
*//*应用说明:在访问I2C设备前,请先调用 i2c_CheckDevice() 检测I2C设备是否正常,该函数会配置GPIO
*/#include "stm32f4xx.h"
#include "i2c_gpio.h"#define RCC_AT24CXX_I2C_PORT RCC_AHB1Periph_GPIOB // GPIO端口时钟
#define GPIO_AT24CXX_I2C_PORT GPIOB // GPIO端口
#define GPIO_AT24CXX_I2C_SCL_Pin GPIO_Pin_6 // 连接到SCL时钟线的GPIO
#define GPIO_AT24CXX_I2C_SDA_Pin GPIO_Pin_7 // 连接到SDA数据线的GPIO#define I2C_SCL_1() GPIO_SetBits(GPIO_AT24CXX_I2C_PORT, GPIO_AT24CXX_I2C_SCL_Pin) // SCL = 1
#define I2C_SCL_0() GPIO_ResetBits(GPIO_AT24CXX_I2C_PORT, GPIO_AT24CXX_I2C_SCL_Pin) // SCL = 0
#define I2C_SDA_1() GPIO_SetBits(GPIO_AT24CXX_I2C_PORT, GPIO_AT24CXX_I2C_SDA_Pin) // SDA = 1
#define I2C_SDA_0() GPIO_ResetBits(GPIO_AT24CXX_I2C_PORT, GPIO_AT24CXX_I2C_SDA_Pin) // SDA = 0
#define I2C_SDA_READ() GPIO_ReadInputDataBit(GPIO_AT24CXX_I2C_PORT, GPIO_AT24CXX_I2C_SDA_Pin) // 读SDA口线状态
#define I2C_SCL_READ() GPIO_ReadInputDataBit(GPIO_AT24CXX_I2C_PORT, GPIO_AT24CXX_I2C_SCL_Pin) // 读SCL口线状态/*
*********************************************************************************************************
* 函 数 名: bsp_InitI2C
* 功能说明: 配置I2C总线的GPIO,采用模拟IO的方式实现
* 形 参: 无
* 返 回 值: 无
*********************************************************************************************************
*/
void BSP_AT24CXX_InitI2C(void)
{GPIO_InitTypeDef GPIO_InitStructure;RCC_AHB1PeriphClockCmd(RCC_AT24CXX_I2C_PORT , ENABLE); /* 打开GPIO时钟 */GPIO_InitStructure.GPIO_Mode = GPIO_Mode_OUT; /* 设为输出口 */GPIO_InitStructure.GPIO_OType = GPIO_OType_OD; /* 设为开漏模式 */GPIO_InitStructure.GPIO_PuPd = GPIO_PuPd_NOPULL; /* 上下拉电阻不使能 */GPIO_InitStructure.GPIO_Speed = GPIO_Speed_25MHz; /* IO口最大速度 */GPIO_InitStructure.GPIO_Pin = GPIO_AT24CXX_I2C_SCL_Pin | GPIO_AT24CXX_I2C_SDA_Pin;GPIO_Init(GPIO_AT24CXX_I2C_PORT, &GPIO_InitStructure);/* 给一个停止信号, 复位I2C总线上的所有设备到待机模式 */i2c_Stop();
}/*
*********************************************************************************************************
* 函 数 名: i2c_Delay
* 功能说明: I2C总线位延迟,最快400KHz
* 形 参: 无
* 返 回 值: 无
*********************************************************************************************************
*/
static void i2c_Delay(void)
{uint8_t i;/* CPU主频168MHz时,在内部Flash运行, MDK工程不优化。用台式示波器观测波形。循环次数为5时,SCL频率 = 1.78MHz (读耗时: 92ms, 读写正常,但是用示波器探头碰上就读写失败。时序接近临界)循环次数为10时,SCL频率 = 1.1MHz (读耗时: 138ms, 读速度: 118724B/s)循环次数为30时,SCL频率 = 440KHz, SCL高电平时间1.0us,SCL低电平时间1.2us上拉电阻选择2.2K欧时,SCL上升沿时间约0.5us,如果选4.7K欧,则上升沿约1us实际应用选择400KHz左右的速率即可*/for (i = 0; i < 30; i++){__NOP();__NOP();}
}/*
*********************************************************************************************************
* 函 数 名: i2c_Start
* 功能说明: CPU发起I2C总线启动信号
* 形 参: 无
* 返 回 值: 无
*********************************************************************************************************
*/
void i2c_Start(void)
{/* 当SCL高电平时,SDA出现一个下跳沿表示I2C总线启动信号 */I2C_SDA_1();I2C_SCL_1();i2c_Delay();I2C_SDA_0();i2c_Delay();I2C_SCL_0();i2c_Delay();
}/*
*********************************************************************************************************
* 函 数 名: i2c_Start
* 功能说明: CPU发起I2C总线停止信号
* 形 参: 无
* 返 回 值: 无
*********************************************************************************************************
*/
void i2c_Stop(void)
{/* 当SCL高电平时,SDA出现一个上跳沿表示I2C总线停止信号 */I2C_SDA_0();I2C_SCL_1();i2c_Delay();I2C_SDA_1();i2c_Delay();
}/*
*********************************************************************************************************
* 函 数 名: i2c_SendByte
* 功能说明: CPU向I2C总线设备发送8bit数据
* 形 参: _ucByte : 等待发送的字节
* 返 回 值: 无
*********************************************************************************************************
*/
void i2c_SendByte(uint8_t _ucByte)
{uint8_t i;/* 先发送字节的高位bit7 */for (i = 0; i < 8; i++){if (_ucByte & 0x80){I2C_SDA_1();}else{I2C_SDA_0();}i2c_Delay();I2C_SCL_1();i2c_Delay();I2C_SCL_0();if (i == 7){I2C_SDA_1(); // 释放总线}_ucByte <<= 1; /* 左移一个bit */i2c_Delay();}
}/*
*********************************************************************************************************
* 函 数 名: i2c_ReadByte
* 功能说明: CPU从I2C总线设备读取8bit数据
* 形 参: 无
* 返 回 值: 读到的数据
*********************************************************************************************************
*/
uint8_t i2c_ReadByte(void)
{uint8_t i;uint8_t value;/* 读到第1个bit为数据的bit7 */value = 0;for (i = 0; i < 8; i++){value <<= 1;I2C_SCL_1();i2c_Delay();if (I2C_SDA_READ()){value++;}I2C_SCL_0();i2c_Delay();}return value;
}/*
*********************************************************************************************************
* 函 数 名: i2c_WaitAck
* 功能说明: CPU产生一个时钟,并读取器件的ACK应答信号
* 形 参: 无
* 返 回 值: 返回0表示正确应答,1表示无器件响应
*********************************************************************************************************
*/
uint8_t i2c_WaitAck(void)
{uint8_t re;I2C_SDA_1(); /* CPU释放SDA总线 */i2c_Delay();I2C_SCL_1(); /* CPU驱动SCL = 1, 此时器件会返回ACK应答 */i2c_Delay();if (I2C_SDA_READ()) /* CPU读取SDA口线状态 */{re = 1;}else{re = 0;}I2C_SCL_0();i2c_Delay();return re;
}/*
*********************************************************************************************************
* 函 数 名: i2c_Ack
* 功能说明: CPU产生一个ACK信号
* 形 参: 无
* 返 回 值: 无
*********************************************************************************************************
*/
void i2c_Ack(void)
{I2C_SDA_0(); /* CPU驱动SDA = 0 */i2c_Delay();I2C_SCL_1(); /* CPU产生1个时钟 */i2c_Delay();I2C_SCL_0();i2c_Delay();I2C_SDA_1(); /* CPU释放SDA总线 */
}/*
*********************************************************************************************************
* 函 数 名: i2c_NAck
* 功能说明: CPU产生1个NACK信号
* 形 参: 无
* 返 回 值: 无
*********************************************************************************************************
*/
void i2c_NAck(void)
{I2C_SDA_1(); /* CPU驱动SDA = 1 */i2c_Delay();I2C_SCL_1(); /* CPU产生1个时钟 */i2c_Delay();I2C_SCL_0();i2c_Delay();
}/*
*********************************************************************************************************
* 函 数 名: i2c_CheckDevice
* 功能说明: 检测I2C总线设备,CPU向发送设备地址,然后读取设备应答来判断该设备是否存在
* 形 参: _Address:设备的I2C总线地址
* 返 回 值: 返回值 0 表示正确, 返回1表示未探测到
*********************************************************************************************************
*/
uint8_t i2c_CheckDevice(uint8_t _Address)
{uint8_t ucAck;if (I2C_SDA_READ() && I2C_SCL_READ()){i2c_Start(); /* 发送启动信号 *//* 发送设备地址+读写控制bit(0 = w, 1 = r) bit7 先传 */i2c_SendByte(_Address | I2C_WR);ucAck = i2c_WaitAck(); /* 检测设备的ACK应答 */i2c_Stop(); /* 发送停止信号 */return ucAck;}return 1; /* I2C总线异常 */
}4、i2c_ee.c
/*
*********************************************************************************************************
*
* 模块名称 : 串行EEPROM 24xx驱动模块
* 文件名称 : bsp_eeprom_24xx.c
* 版 本 : V1.0
* 说 明 : 实现24xx系列EEPROM的读写操作。写操作采用页写模式提高写入效率。
*
* 修改记录 :
* 版本号 日期 作者 说明
* V1.0 2013-02-01 armfly 正式发布
*
* Copyright (C), 2013-2014, 安富莱电子 www.armfly.com
*
*********************************************************************************************************
*//*应用说明:访问串行EEPROM前,请先调用一次 bsp_InitI2C()函数配置好I2C相关的GPIO.
*/#include "i2c_gpio.h"
#include "i2c_ee.h"/*
*********************************************************************************************************
* 函 数 名: ee_CheckOk
* 功能说明: 判断串行EERPOM是否正常
* 形 参: 无
* 返 回 值: 1 表示正常, 0 表示不正常
*********************************************************************************************************
*/
uint8_t ee_CheckOk(void)
{if (i2c_CheckDevice(EE_DEV_ADDR) == 0){return 1;}else{/* 失败后,切记发送I2C总线停止信号 */i2c_Stop();return 0;}
}/*
*********************************************************************************************************
* 函 数 名: ee_ReadBytes
* 功能说明: 从串行EEPROM指定地址处开始读取若干数据
* 形 参: _usAddress : 起始地址
* _usSize : 数据长度,单位为字节
* _pReadBuf : 存放读到的数据的缓冲区指针
* 返 回 值: 0 表示失败,1表示成功
*********************************************************************************************************
*/
uint8_t ee_ReadBytes(uint8_t *_pReadBuf, uint16_t _usAddress, uint16_t _usSize)
{uint16_t i;/* 采用串行EEPROM随即读取指令序列,连续读取若干字节 *//* 第1步:发起I2C总线启动信号 */i2c_Start();/* 第2步:发起控制字节,高7bit是地址,bit0是读写控制位,0表示写,1表示读 */#if EE_ADDR_A8 == 1i2c_SendByte(EE_DEV_ADDR | I2C_WR | ((_usAddress >> 7) & 0x0E)); /* 此处是写指令 */#elsei2c_SendByte(EE_DEV_ADDR | I2C_WR); /* 此处是写指令 */#endif/* 第3步:发送ACK */if (i2c_WaitAck() != 0){goto cmd_fail; /* EEPROM器件无应答 */}/* 第4步:发送字节地址,24C02只有256字节,因此1个字节就够了,如果是24C04以上,那么此处需要连发多个地址 */if (EE_ADDR_BYTES == 1){i2c_SendByte((uint8_t)_usAddress);if (i2c_WaitAck() != 0){goto cmd_fail; /* EEPROM器件无应答 */}}else{i2c_SendByte(_usAddress >> 8);if (i2c_WaitAck() != 0){goto cmd_fail; /* EEPROM器件无应答 */}i2c_SendByte(_usAddress);if (i2c_WaitAck() != 0){goto cmd_fail; /* EEPROM器件无应答 */}}/* 第6步:重新启动I2C总线。下面开始读取数据 */i2c_Start();/* 第7步:发起控制字节,高7bit是地址,bit0是读写控制位,0表示写,1表示读 */#if EE_ADDR_A8 == 1i2c_SendByte(EE_DEV_ADDR | I2C_RD | ((_usAddress >> 7) & 0x0E)); /* 此处是写指令 */#else i2c_SendByte(EE_DEV_ADDR | I2C_RD); /* 此处是写指令 */#endif /* 第8步:发送ACK */if (i2c_WaitAck() != 0){goto cmd_fail; /* EEPROM器件无应答 */}/* 第9步:循环读取数据 */for (i = 0; i < _usSize; i++){_pReadBuf[i] = i2c_ReadByte(); /* 读1个字节 *//* 每读完1个字节后,需要发送Ack, 最后一个字节不需要Ack,发Nack */if (i != _usSize - 1){i2c_Ack(); /* 中间字节读完后,CPU产生ACK信号(驱动SDA = 0) */}else{i2c_NAck(); /* 最后1个字节读完后,CPU产生NACK信号(驱动SDA = 1) */}}/* 发送I2C总线停止信号 */i2c_Stop();return 1; /* 执行成功 */cmd_fail: /* 命令执行失败后,切记发送停止信号,避免影响I2C总线上其他设备 *//* 发送I2C总线停止信号 */i2c_Stop();return 0;
}/*
*********************************************************************************************************
* 函 数 名: ee_WriteBytes
* 功能说明: 向串行EEPROM指定地址写入若干数据,采用页写操作提高写入效率
* 形 参: _usAddress : 起始地址
* _usSize : 数据长度,单位为字节
* _pWriteBuf : 存放读到的数据的缓冲区指针
* 返 回 值: 0 表示失败,1表示成功
*********************************************************************************************************
*/
uint8_t ee_WriteBytes(uint8_t *_pWriteBuf, uint16_t _usAddress, uint16_t _usSize)
{uint16_t i,m;uint16_t usAddr;/*写串行EEPROM不像读操作可以连续读取很多字节,每次写操作只能在同一个page。对于24xx02,page size = 8简单的处理方法为:按字节写操作模式,每写1个字节,都发送地址为了提高连续写的效率: 本函数采用page wirte操作。*/usAddr = _usAddress;for (i = 0; i < _usSize; i++){/* 当发送第1个字节或是页面首地址时,需要重新发起启动信号和地址 */if ((i == 0) || (usAddr & (EE_PAGE_SIZE - 1)) == 0){/* 第0步:发停止信号,启动内部写操作 */i2c_Stop();/* 通过检查器件应答的方式,判断内部写操作是否完成, 一般小于 10msCLK频率为200KHz时,查询次数为30次左右*/for (m = 0; m < 1000; m++){/* 第1步:发起I2C总线启动信号 */i2c_Start();/* 第2步:发起控制字节,高7bit是地址,bit0是读写控制位,0表示写,1表示读 */#if EE_ADDR_A8 == 1i2c_SendByte(EE_DEV_ADDR | I2C_WR | ((_usAddress >> 7) & 0x0E)); /* 此处是写指令 */#else i2c_SendByte(EE_DEV_ADDR | I2C_WR);#endif/* 第3步:发送一个时钟,判断器件是否正确应答 */if (i2c_WaitAck() == 0){break;}}if (m == 1000){goto cmd_fail; /* EEPROM器件写超时 */}/* 第4步:发送字节地址,24C02只有256字节,因此1个字节就够了,如果是24C04以上,那么此处需要连发多个地址 */if (EE_ADDR_BYTES == 1){i2c_SendByte((uint8_t)usAddr);if (i2c_WaitAck() != 0){goto cmd_fail; /* EEPROM器件无应答 */}}else{i2c_SendByte(usAddr >> 8);if (i2c_WaitAck() != 0){goto cmd_fail; /* EEPROM器件无应答 */}i2c_SendByte(usAddr);if (i2c_WaitAck() != 0){goto cmd_fail; /* EEPROM器件无应答 */}}}/* 第6步:开始写入数据 */i2c_SendByte(_pWriteBuf[i]);/* 第7步:发送ACK */if (i2c_WaitAck() != 0){goto cmd_fail; /* EEPROM器件无应答 */}usAddr++; /* 地址增1 */}/* 命令执行成功,发送I2C总线停止信号 */i2c_Stop();/* 通过检查器件应答的方式,判断内部写操作是否完成, 一般小于 10msCLK频率为200KHz时,查询次数为30次左右*/for (m = 0; m < 1000; m++){/* 第1步:发起I2C总线启动信号 */i2c_Start();/* 第2步:发起控制字节,高7bit是地址,bit0是读写控制位,0表示写,1表示读 */ #if EE_ADDR_A8 == 1i2c_SendByte(EE_DEV_ADDR | I2C_WR | ((_usAddress >> 7) & 0x0E)); /* 此处是写指令 */#else i2c_SendByte(EE_DEV_ADDR | I2C_WR); /* 此处是写指令 */#endif/* 第3步:发送一个时钟,判断器件是否正确应答 */if (i2c_WaitAck() == 0){break;}}if (m == 1000){goto cmd_fail; /* EEPROM器件写超时 */}/* 命令执行成功,发送I2C总线停止信号 */i2c_Stop(); return 1;cmd_fail: /* 命令执行失败后,切记发送停止信号,避免影响I2C总线上其他设备 *//* 发送I2C总线停止信号 */i2c_Stop();return 0;
}
八、测试
下面以AT24C512为例,进行测试,测试以下功能:
1、任意地址连续跨页读多页数据
2、任意地址连续跨页写多页数据
注意:如果需要测试AT24C512,需要在i2c_ee.h中定义宏定义 AT24C512,告诉单片机目前的芯片是AT24C512芯片。
#define AT24C512注意:如果需要测试AT24C128,需要在i2c_ee.h中定义宏定义 AT24C128,告诉单片机目前的芯片是AT24C128芯片.
#define AT24C128为便于观察数据读写的每一个字节都是否正确,初始化数组时,将test_array1[0—127] 初始化数值 = 1—128
test_array1[128—255] 初始化数值 = 1—128
test_array1[256—383] 初始化数值 = 1—128
下面的测试程序先将存储在数组test_array1中的连续3页数据写到起始地址为80的芯片中。然后将起始地址为80的芯片中的数据读到数组test_array2.
main.c
#include "i2c_gpio.h"#include "i2c_ee.h"uint8_t test_array1[3*EE_PAGE_SIZE]; //注:AT24C512时,EE_PAGE_SIZE=128uint8_t test_array2[3*EE_PAGE_SIZE]; // AT24C512时,一个页面有128个字节 void DEBUG_test_AT24C512(void){uint16_t i;uint16_t j;for (i=0;i<3*EE_PAGE_SIZE;i++){if (i>=256)j=i-256; //test_array1[256---383] 单元初始化数值 = 1---128else if (i>=128)j=i-128; //test_array1[128---255] 单元初始化数值 = 1---128elsej=i; //test_array1[0---127] 单元初始化数值 = 1---128test_array1[i]=j+1;}memset(test_array2,0x00,3*EE_PAGE_SIZE); if (ee_CheckOk() == 1) //如果检测到I2C器件存在{ee_WriteBytes(test_array1,80,3*EE_PAGE_SIZE); //从I2C的地址80处开始写3页字节(测试跨页连续写)ee_ReadBytes(test_array2,80,3*EE_PAGE_SIZE); //从I2C的地址80处开始读3页字节(测试跨页连续读)}}int main(void)
{BSP_AT24CXX_InitI2C();DEBUG_test_AT24C512();while (1){}
}
九、测试结果




可以观察到先将3页数据(共计128*3=384个字节) 写到AT24C512起始地址80处,然后再次读出,数据完全正确。